

-
-
-
Contactez-nous











Système de conduite autonome pour véhicules en plein air
Le transport routier en plein air constitue le principal mode de transport dans les mines à ciel ouvert et représente également un maillon essentiel qui influence la production. Hunan Chuangyuan a développé en propre un système autonome de transport en plein air grâce à des technologies de fusion multisensorielle, de localisation RTK haute précision, de contrôle précis et robuste par optimisation de trajectoire, de commande linéaire du châssis ainsi qu'à des technologies d'intelligence artificielle, contribuant ainsi à la modernisation intelligente des mines et à la réalisation d'un transport entièrement autonome.
|
Camion à ciel ouvert |
Chargeur |
Machine à pousser les pierres |
Camion d'arrosage |




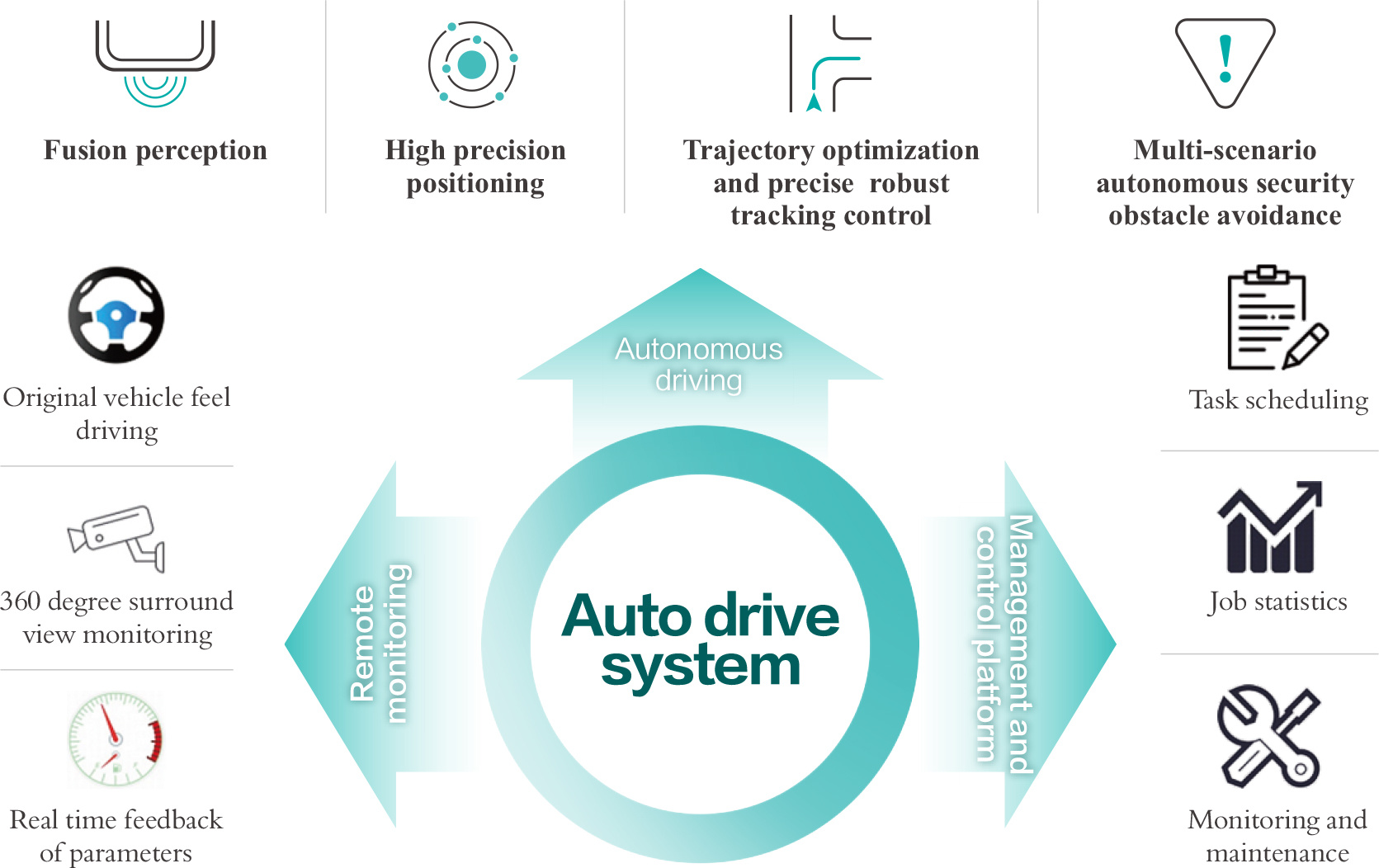
Fonctions du système

Perception intégrée Grâce à l'intégration de lidar à faisceau élevé, de caméras de reconnaissance visuelle et de radars à ondes millimétriques, ainsi qu'à un algorithme de réduction du bruit LDA développé en interne pour fonctionner dans des environnements poussiéreux, cet équipement offre une couverture de détection à 360 degrés sans angle mort. Il demeure capable de réaliser une numérisation en temps réel et une détection précise des piétons, des infrastructures fixes (panneaux de signalisation, poteaux électriques, etc.) et des obstacles mobiles (gros blocs rocheux, tas de matériaux, etc.), même dans des conditions environnementales difficiles telles que faible poussière, pluie légère ou neige légère. |
Sécurité Pendant le fonctionnement normal du véhicule, celui-ci peut utiliser son système de perception pour détecter les infrastructures de base, les obstacles statiques (tels que des objets volumineux) et les obstacles dynamiques (piétons, autres véhicules en sens inverse). Il mettra alors en œuvre une stratégie d'évitement adaptée : par exemple, lorsqu'un autre véhicule se rapproche, le véhicule léger cédera la place au véhicule lourd ; si un piéton s'approche à une distance de freinage critique, le véhicule effectuera un freinage d'urgence. Lorsque le véhicule se rapproche de la limite d'une barrière électronique (comme une marche), il respectera une distance de sécurité avant d'effectuer un freinage d'urgence. Si le véhicule autonome ou le véhicule contrôlé à distance perd la communication avec la station de contrôle, il ralentira immédiatement et s'arrêtera en bordure de route, à condition de disposer d'une marge de sécurité suffisante. |
|
Positionnement de haute précision Localisation RTK par satellite mondial haute précision, permettant un suivi de trajectoire au centimètre près ; correction de la localisation par radar à point fixe, assurant ainsi un arrêt stable et de haute précision. |
Contrôle précis et stable En adoptant une technologie de direction et d'entraînement à commande par câble haute précision, fortement réactive et très fiable, nous établissons des modèles cinématiques et dynamiques précis et concevons un contrôleur de suivi latéral et longitudinal en temps réel, permettant ainsi un contrôle précis et stable du véhicule. |
|
Optimisation de la trajectoire En fonction des conditions réelles d'exploitation des équipements de transport en plein air, nous avons mis au point en propre un algorithme de planification de trajectoire DDAS (D - Distance latérale de sécurité, D - Distance longitudinale de sécurité, A - Ligne de référence longitudinale de l'équipement de transport, S - Ligne de référence longitudinale de l'équipement de chargement), permettant ainsi d'obtenir la meilleure correspondance de position entre les équipements de transport et les équipements de chargement. |
Conduite autonome Le véhicule est capable d'effectuer automatiquement le démarrage, l'accélération et le ralentissement, le freinage, la direction et le déchargement sur un itinéraire préétabli, permettant ainsi une opération de transport automatisée sans conducteur. |
|
Prise de contrôle à distance Plateforme de conduite multifonctionnelle à distance, comprenant des accoudoirs gauche et droit intégrés au siège de conduite, dotés des boutons de commande d'origine du véhicule, ainsi que de poignées et de pédales, pour reproduire fidèlement le fonctionnement d'une cabine de conduite réelle. Écran d'information avant du véhicule (vitesse, régime moteur, pression d'huile, etc.), écran de surveillance en temps réel des images 360° du véhicule. Grâce à la correspondance avec l'identifiant du véhicule, il est possible d'intervenir à tout moment sur n'importe quel camion équipé de fonctions de conduite autonome afin d'en assurer une conduite manuelle. |
Planification des tâches Selon le plan de production, saisissez le plan de transport pour chaque véhicule ; le système effectuera automatiquement l'exécution des tâches de production, tout en permettant une réaffectation temporaire manuelle dont les autorisations sont supérieures à celles attribuées automatiquement par le système. |




Vous offrir des équipements intelligents capables d'effectuer des opérations autonomes.
Solution globale pour les mines
Nous pouvons vous aider à trouver quelque chose.
Adresse : Bâtiment C3, Huanchuang Enterprise Plaza, 2450 Yuelu Avenue West, Changsha, province du Hunan, République populaire de Chine.
Droit d'auteur © Hunan Chuangyuan HIGH-TECH Machinery Co., Ltd.