

-
-
-
Contactez-nous











Système de conduite autonome pour véhicules souterrains
Le système de conduite autonome des véhicules souterrains, grâce à des technologies avancées de capteurs, d'intelligence artificielle et de contrôle intelligent, permet aux véhicules souterrains de se déplacer de manière autonome et sans conducteur. Grâce à des technologies de communication sans fil avancées, à la télécommande à distance et à des technologies de visualisation, ce système assure une opération précise du chargement et du déchargement des matériaux miniers dans les mines souterraines par les pelleteuses.
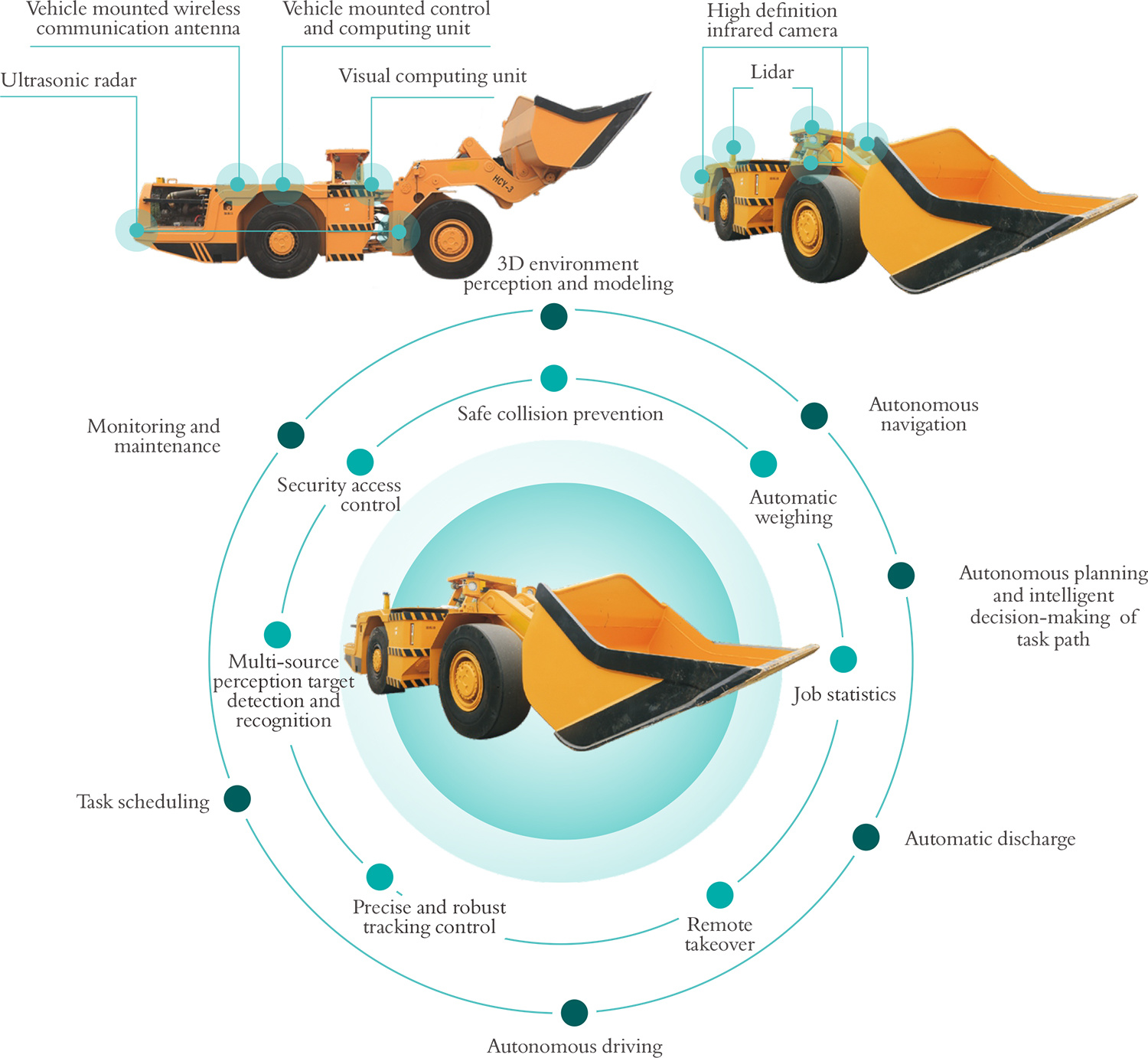
Fonctions du système

Perception et modélisation de l'environnement en 3D Équipé d'un lidar à faisceaux multiples, il effectue en temps réel un balayage et une modélisation des ruelles, établit une carte visuelle, perçoit l'environnement environnant et suit le déplacement du véhicule. |
Planification autonome de la trajectoire de mission et prise de décision intelligente Le système collecte en temps réel, grâce au processus d'enseignement, des données de perception de l'environnement, des données de localisation et des données relatives aux trajets d'exécution. |
|
Suivi et maintenance Diagnostic en temps réel des pannes et alertes visuelles, sonores et textuelles pour faciliter le repérage rapide des points de défaillance et de leur état. Intégration d'alertes de maintenance et d'entretien, permettant une maintenance préventive régulière et une inspection programmée, réduisant ainsi le temps consacré à l'entretien des équipements et augmentant le temps utile d'exploitation. |
Contrôle de suivi robuste et précis En adoptant une technologie de direction et de freinage à commande par câble haute précision, fortement réactive et extrêmement fiable, pour la pelle... |

Prise de contrôle à distance La plateforme de conduite multifonctionnelle à distance comprend des accoudoirs intégrés aux deux côtés du siège de conduite, équipés des boutons de commande d'origine du véhicule, ainsi que des poignées et des pédales, reproduisant ainsi fidèlement le fonctionnement d'une cabine de conduite réelle. Un écran entièrement numérique affiche en temps réel les informations de localisation du véhicule souterrain, sa vitesse de déplacement, les données relatives aux voies, l'angle de pente, ainsi que la carte de circulation, l'itinéraire et les images en temps réel depuis plusieurs angles de caméras de surveillance. Les opérateurs peuvent prendre le contrôle du véhicule souterrain à tout moment. |
Statistiques des devoirs Statistiques des données opérationnelles réelles, suivi automatique de la production minière, rapports journaliers, hebdomadaires et mensuels sur les activités de production, destinés à appuyer la prise de décisions en matière de production. |
|
Détection et reconnaissance d'objets par perception multi-source En utilisant en temps réel des données environnementales issues du lidar et d'une caméra stéréoscopique, et en recourant à la technologie de reconnaissance d'images.
|
Sécurité Pendant la conduite autonome, le véhicule suspend son fonctionnement dans les situations suivantes : lidar ou |



Vous offrir des équipements intelligents capables d'effectuer des opérations autonomes.
Solution globale pour les mines
Nous pouvons vous aider à trouver quelque chose.
Adresse : Bâtiment C3, Huanchuang Enterprise Plaza, 2450 Yuelu Avenue West, Changsha, province du Hunan, République populaire de Chine.
Droit d'auteur © Hunan Chuangyuan HIGH-TECH Machinery Co., Ltd.