

-
-
-
Contactez-nous











Système de conduite autonome pour locomotives
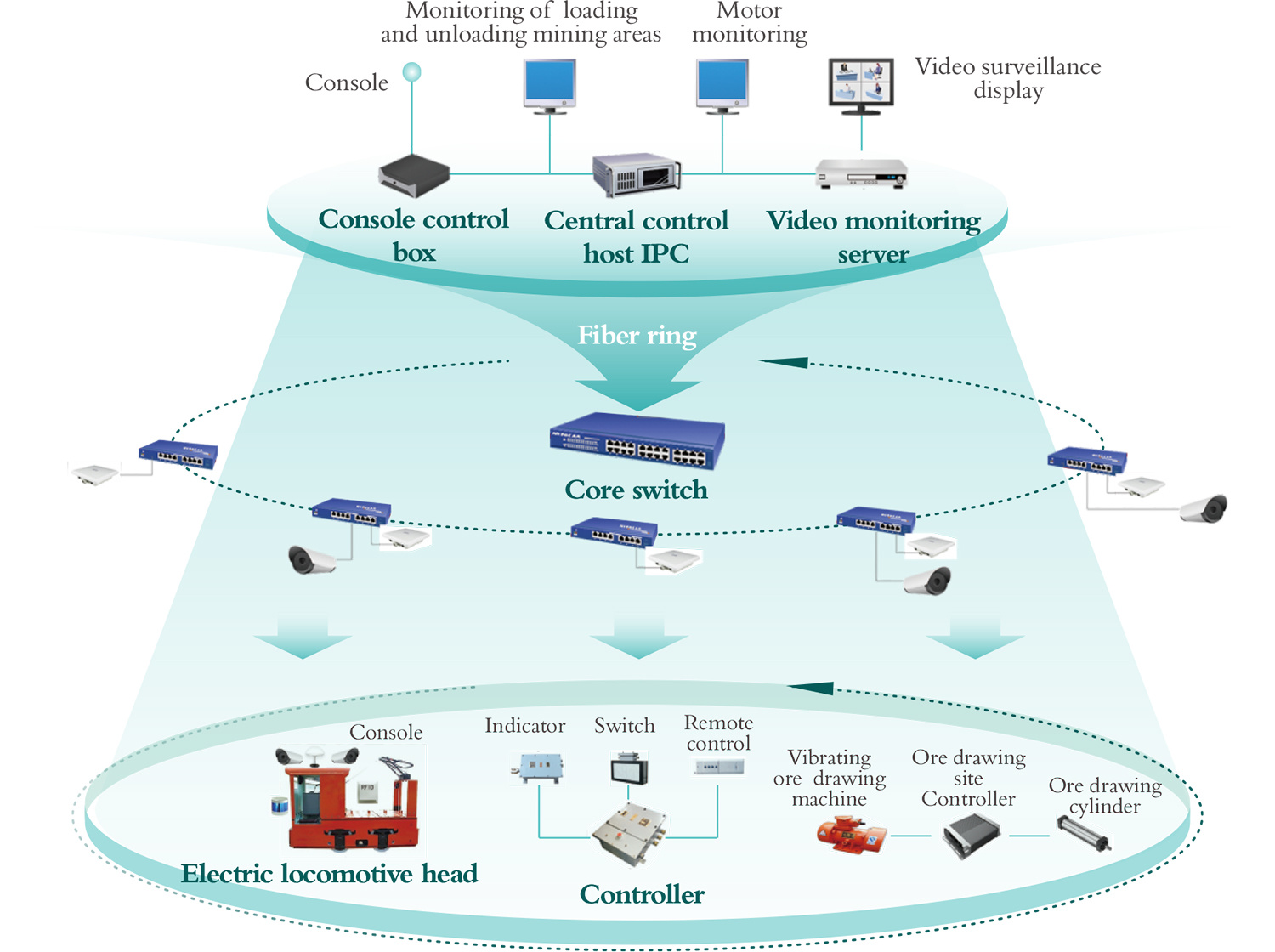
Le système de conduite autonome pour équipements ferroviaires miniers est un système sans conducteur destiné aux locomotives minières, aux chariots monorail et autres véhicules de transport minier, basé sur la technologie d'intelligence artificielle et conçu pour opérer dans des environnements souterrains à faible éclairage et potentiellement explosifs. Le système utilise comme plateforme de transmission les technologies de communication sans fil haute vitesse, les réseaux en anneau à fibre optique ou la communication 5G, et s'appuie sur un système de surveillance du transport minier développé en interne pour garantir la sécurité. Il intègre notamment une technologie de localisation précise des locomotives souterraines, la technologie GIS, la vision par machine, la technologie de localisation UWB au centimètre près ainsi que des dispositifs de sauvegarde et de secours pour la sécurité des locomotives. Équipé d'un algorithme original de conduite intelligente pour locomotives, ce système permet d'automatiser intégralement le processus de chargement, de transport et de déchargement des matériaux et des minerais par les locomotives.
Fonctions du système

Technologie de détection du niveau de matière dans les puits de vidange et les fosses de rejet de minerai En combinant le radar à bande X spécialement développé par notre société avec un laser à faisceau unique, la détection s'effectue automatiquement. |
Surveillance du niveau de stockage et des blocages miniers dans la station de déchargement Le capteur de niveau de matériau détecte en temps réel le niveau de matériau dans la station de déchargement ; lorsque le véhicule arrive à la station de déchargement, |
|
Chargement automatique du minerai La technologie de chargement automatique des minerais constitue un maillon essentiel pour le fonctionnement autonome des locomotives, que ce soit en souterrain ou à la surface. |
Contrôle sans conducteur des locomotives Le contrôleur embarqué reçoit, via le réseau, les instructions du système du centre de contrôle à distance et ajuste automatiquement les paramètres. |

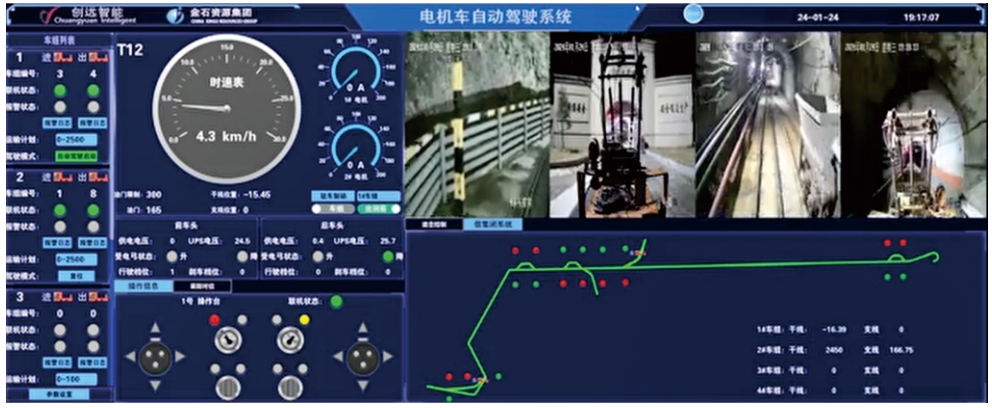
Contrôle de vitesse autonome pour locomotive Sur la base du principe de croisière, établissez un modèle de croisière à vitesse variable pour les véhicules (modèle de croisière adaptatif). En fonction des instructions de conduite émises par le logiciel d'optimisation et de planification de la production, et en tenant compte de la distribution objective des voies ou routes – notamment l'état des tronçons rectilignes et des virages à venir, ainsi que la nécessité éventuelle d'éviter d'autres véhicules – ce modèle permet une adaptation dynamique aux conditions de la voie et aux instructions de planification, ajustant automatiquement la vitesse de conduite. Ainsi, l'ensemble du processus – chargement du minerai, déplacement et déchargement – devient entièrement autonome. C'est précisément là l'essence même du contrôle par une seule personne de plusieurs locomotives.
|
|



Vous offrir des équipements intelligents capables d'effectuer des opérations autonomes.
Solution globale pour les mines
Nous pouvons vous aider à trouver quelque chose.
Adresse : Bâtiment C3, Huanchuang Enterprise Plaza, 2450 Yuelu Avenue West, Changsha, province du Hunan, République populaire de Chine.
Droit d'auteur © Hunan Chuangyuan HIGH-TECH Machinery Co., Ltd.